
| Description | Travel Guide written in coorperation with my father about Ireland and Northern Ireland. |
| Edition | 1. Edition 2025 |
| ISBN | 978-3-8317-3934-9 |
| Link | Available here |
| Description | Travel Guide written in coorperation with my father about Ireland and Northern Ireland. |
| Edition | 1. Edition 2025 |
| ISBN | 978-3-8317-3934-9 |
| Link | Available here |

| Description | Travel Guide written in coorperation with my father about the region Lüneburger Heide in Lower Saxony, Germany. |
| Edition | 1. Edition 2024 |
| ISBN | 978-3-8317-3733-8 |
| Link | Available here |
The near future… the year 3000. The world is invaded by smombies. Since everyone is looking at their smartphones all the time, the driving tests have been adjusted: Learner driver have to write messages on their phone while they drive! Will you pass the test and qualify as a citizen on earth in the 31th century? Find it out!
You will need your PC and your Smartphone to play this game. No app is needed you can play the game in your smartphone browser.
Game title: “Smombie Driver“
Space of time: 28/11/2016 – 30/11/2016
Coding Language: Unity 3D (Game) + Meteor (App)
Team: 9 people
Background: Developed in 48 hours at the InnoGames Game Jam #11.
Theme: Serious Games
Game (Computer): Windows | OSX | Linux
App (Open URL on Smartphone): http://smombie-driver.herokuapp.com/

You’re at a party with your friends and looking for the perfect game to get drunk? DICE&DRINK is the solution! This game combines the most important features a drinking game needs: It’s fun, it’s risky and you can show your buddies who’s the boss. Play it at a house party, while queueing up for a concert or on a big family celebration. Yes, even your parents will love it. Maybe.
DICE&DRINK is a drinking game where the players need to roll a higher or lower value depending on the direction of the round. But be careful: If you don’t succeed you’ll have to drink!
Game title: “Dice and Drink“
Space of time: 01/2017 – 03/2017
Technology used: Unity 3D
Team: 2 people
![]()

In the game “The popular Wave” the player takes over the role of the president of a country. One of the responsibilities of the president is to travel through the country and hold speeches in front of the people. Unfortunately not everyone seems to be enjoying the words of the president as much as he wishes. How would the press react if the people at a speech of our beloved president are not fully enthusiastic about his words? Better motivate the people to keep waving by giving them a persuasive gaze.
The game was designed for the eye tracking system Tobii Eyex which made it possible to play the game only by looking at the screen. However the game can also be played with a standard mouse.
Game title: “The popular Wave“
Space of time: 20/01/2017 – 22/01/2017
Technology used: Unity 3D + Tobii Eyex (eye tracking system)
Team: 7 people
Background: Developed in 48 hours for the Global Game Jam 2017.
Theme: Wave
Downloads: Windows | Linux | OSX | Android
Link: Global Game Jam Site

Tales of Toast and Time is a Point and Click Adventure Game, which follows the journey of a young man on his quest to prepare breakfast for his loved one. Unfortunately his cooking skills are questionable, resulting in the creation of a distortion in time and space. Through the wrap-hole he can travel to what would have been his appartment in the past and what will be there in the future. Why not take that chance to find the perfect breakfast ingredients? See for yourself what this this mans cooking skills can create when defying the laws of time!
Game title: “Tales of Toast and Time“
Space of time: 28/11/2016 – 30/11/2016
Coding Language: Unity 3D + Adventure Creator
Team: 6 people
Background: Developed in 48 hours at the InnoGames Game Jam #10.
Theme: Time cheating
Artificial intelligence is an important topic for video games. It can be used to simulate human-like behavior for non-player characters (NPCs). NPCs can be used to create opponents in a game or to enhance the universe of a game. Introducing NPCs in a competitive strategy game can help to improve the long time play value of the game. NPCs could, for example, be used to implement in-game events, where players have to ally to defeat an NPC. Additionally, a computer program acting like a human player could be used to perform real-life server load tests to check if changes in, for example, database queries have an effect on the performance of the game, before they go into production mode.
This thesis discusses the conception and development of the first artificial intelligence for the game Grepolis. In this project, different strategies for artificial intelligence in video games, with a focus on decision making, are evaluated how good they to the game. Important questions concerning the implementation of artificial intelligence in video games are asked and answered for this project. A concept for an artificial intelligent NPC for the game Grepolis is built and implemented. Finally an evaluation is done to prove that the implemented solution corresponds to the requirements of the project.
After completing the project, InnoGames has a functional artificial intelligence for the game Grepolis that simulates human-like behavior. The developed solution uses the well known decision making techniques decision trees, state machines and goal oriented behavior to create a new way of decision making.
Space of time: 02/2016 – 09/2016
Coding Language: PHP
Team: alone
Background: Master thesis during my work as a working student at InnoGames
Report: Click here

In this project an application was developed that could be used to control the industrial robot KUKA LBR iiwaa 7 R800 with gestures and voice. The sensors for detecting sound and images were provided by a customary Microsoft Kinect v2. The project evaluated what functionalities can be achieved with this technology.
Furthermore the calibration of camera and robot (hand-eye-calibration) needed to be as effortless as effortless as possible.
Space of time: 09/2015 – 02/2016
Coding Language: C# and Java
Team: alone
Background: Developed as a university project
Report (German): View Report
Second screen is conquering the video game scene. Big companies like Nintendo or Sony implemented such features in their latest consoles. Nintendo created the Wii U GamePad, which has an integrated display, while Sony uses the PS Vita to enable Remote Play.
The problem with both of the described systems is that you need special hardware to be able to use the second screen features. Nowadays nearly everybody possesses a smartphone, which has a multi core processor. So why don’t we use the hardware, that we are carrying around with us all the time, as a second screen device?
This project evaluates the use of a second screen game created with the HTML5 game engine Phaser.

In this game the smartphone acts as the controller (Player), while an other device with ideally a big screen acts as the spectator.
The game proceeds in two different phases.
The car
Every player controls a car. Each car has the abilities to ignite a nitro and to fire a blast, that is blasting the other cars in the area away.
The ball ![]()
The ball as the key feature in the game needs to be hit by the cars. Each hit gives the player a point and a coin and increments the counter of the ball by one. The hundredth hit lets the ball explode and takes the cars nearby along. Exploded cars loose their points but keep their coins for the tuning phase.
Trapdoors ![]()
The level of chaos is increased by trapdoors, that are spread over the map. The trapdoor open in irregular intervals. Players, that are falling into open trapdoors, loose their points but keep their coins for the tuning phase.
Bumpers![]()
The bumpers, that are located in the corners of the map, let the ball rebound and ensure, that the ball does not get stuck in the corners.
After the ball is exploded or if any player but one is fallen into a trapdoor, the second game phase, the tuning phase begins. In the tuning phase each player can improve the following features of his car:
Speed: Tuning the speed increases the top speed of the car.
Handling: Handling determines the turn speed and the acceleration of the car.
Armor: Increasing the armor value improves the behavior of a car, when it is hit by a blast.
Ammunition: Ammunition is the amount of blasts a player can shoot during one round.
Boost: The boost value is the amount of nitro boost a player can use during one round.
After twenty seconds the next game phase starts automatically.
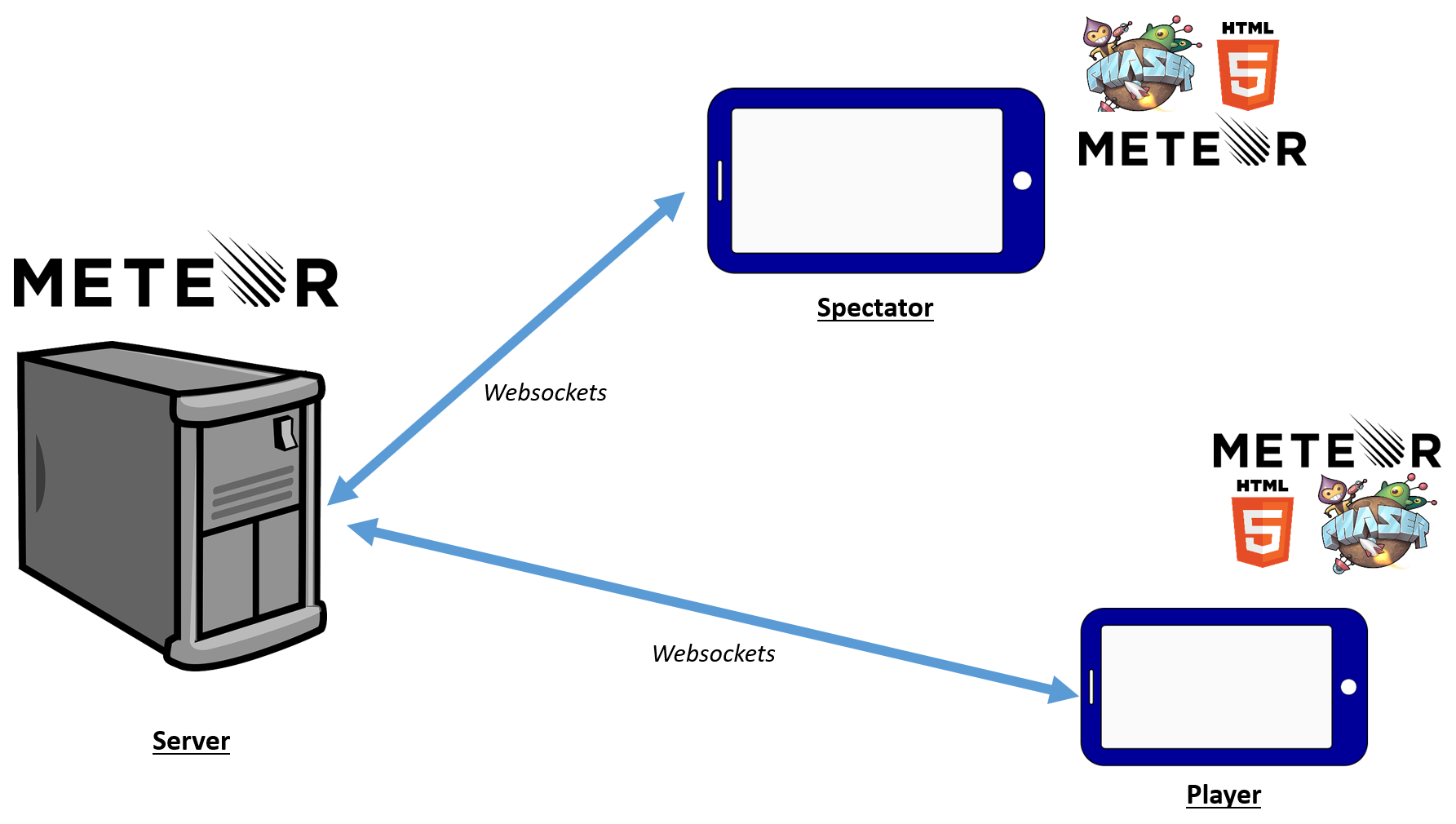 The game was programmed using the JavaScript framework Meteor and the HTML5 game engine Phaser. On the server meteor enables the use of Node.js and has integrated support for WebSocket communication between the server and the clients.
The game was programmed using the JavaScript framework Meteor and the HTML5 game engine Phaser. On the server meteor enables the use of Node.js and has integrated support for WebSocket communication between the server and the clients.
With HTML5 you have the possibility to use the hardware sensors of devices like smartphones. It is possible to get information of, for example, the accelerometer. In this project the accelerometer was used to detect a shake of the device. Another HTML5 feature, that was used was the Vibration API to give the user feedback for specific events. Unfortunately HTML5 is not supported equally by all browsers. The Virbations API, for example, is not working on the Safari Browser for iOS devices. This leads to an inconsistent game behavior on different devices and can only be solved by finding exceptions for not supported features. But it can be assumed that the support for HTML5 features will improve with every upcoming browser update.
Phaser is an open source framework to create Canvas or WebGL powered HTML5 browser games. The focus on mobile browsers ensures that every available feature works good on a mobile device. Because it is open source and comes as one single JavaScript file it is easily expandable or can be easily integrated in other frameworks. The three build-in physics engines (Arcade, Ninja or P2.JS) give the developer the freedom to choose the best fitting physics behavior. In this project P2.JS was used since it is the most complex of the three engines and gives the most freedom for the development.
The game is presented in a cartoon style and uses an isometric projection as the perspective. The isometric projection enables a visual representation of three dimensions where technically only two dimensions are possible.
The car was created with the 3D graphics and animation software Blender. A turnaround was animated and exported as single frames. Those frame where combined to a sprite sheet with the tool Texturepacker.
Since the game is playable with up to 30 players it is necessary to have 30 different colored cars. The car was exported in grayscale and later on tinted dynamically in the program code.
![]()
Other game elements like the traps or bumpers where animated using Adobe Flash and also packed to a sprite sheet with Texturepacker. To complete the cartoon look a font was created and could be used as bitmap text in the game.

Game title: “Nobody is attending (yet)“
Space of time: 11/09/2015 – 13/09/2015
Coding Language: Construct 2
Team: 3 people
Background: Developed in 48 hours at the Indie Gameleon Game Jam 2015.
Theme: Making a positive impact on the real world